
МЫ ЗАПУСТИЛИ НОВЫЙ САЙТ ПО АДРЕСУ: ZMARKETCHANGERS.COM
WE HAVE LAUNCHED NEW AND BETTER WEBSITE: ZMARKETCHANGERS.COM
Many times, especially during winter season, I’ve been looking at the tiny whoop FPV copters at different online stores but never hit «ORDER» button — they’ve all looked attractive but equipped with brushed motors… thus, underpowered. Maybe they are good for indoor use, but I always prefer to have something more versatile, something that I can fly indroors during bad weather or winter season and at the same time something that I can take with me outdoors and have almost the same experience as I do with the larger 180-250 class FPV copters. I’ve even tried to fly a couple of brushed models — they all feel slow and definitely change the way I’ve used to fly and move my fingers. Moreover, brushed motors wear over time resulting in adding more and more THr input to fly the model. Not really good.

On the other hand — there is a new and quickly emerging market niche for micro FPV copters powered by the brushless motors. And one of the first companies who already got something to say about it is KingKong — a company that is very well known for its good FPV products like props, RTF whoops, antennas, transmitters and so on. And you know what? They already inroduced more than one brushless RTF FPV micro quad — KingKong 90GT and KingKong Q90.

Today, I would concentrate on KingKong 90GT. I have this quad for almost a week now, had a plenty of flights and can now share my experience. Let’s start:
KingKong 90GT technical characteristics:
- Flight Control: Micro SpRacing F3 6Dof Version with 32-bit STM32F303CC processor and MPU6050
- Motor: 1103 7800KV Motor
- ESC : 3A Blheli_S 4 in 1 Brushless ESC (OneShot 42/125, MultiShot, DShot 150/300/600)
- Camera: 800TVL CMOS Camera FOV150 Degree
- Propeller: 2 CW & 2 CCW (Red transparent)
- FPV Transmitter: 16CH 25mW VTX
- Battery: 2S 7.4V 350mAh 25C
- Wheelbase: 90 mm
- Dimension: 82x82x28 mm
- Weight: 42.9g (without battery)

Comes in several versions:
- ARF (no receiver)
- PNP with FrSKY AC800 (only RSSI on telemetry)
- PNP with DSM2 receiver
- PNP with FASST receiver
My version is FrSKY AC800 receiver because I am using FrSKY Taranis X9DP and QX7 radios.


In the box:
- Carry case, «lunch box» type
- RTF copter
- 2S 7.4V 350mAh 25C battery
- 2 sets of 1935 porps
- 1 set of prop screws
- 1 set of plastic protection frames
- 1 set of longer screws with washers for potection frames
- 2 spare battery holder rubber rings
- 1 wrench
- microUSB-USB cable
- 1 set of additional cables for F3 board
- short manual
You can get the manual HERE
New version of this product: FrSKY Vantac GT90 — similar product but with much better FrSKY receiver XM in the bundle.
You can buy KingKong 90GT: HERE Don’t worry, this shop is from good person in China. It might look unfinished yet but your orders would be pocessed in the best way. Support this shop on its early stage and we would eventually have one more good place to order from. If you would have any questions about your order — leave a comment and I’d help you out.

So, in other words, what are the features and what is so good about this model?
- 90mm wheelbase powered by 1103 7800kv brushless motors that give plenty of power and larger copter feel
- no motor wear over time, brushless means durable
- common tuning practice due to the use of F3 board, BetaFlight|CleanFlight FW, BLHeli_s ESCs.
- removable plastic props and frame protection that would let you fly indoors and outdoors with maximum protection
Really nice features and package that brings this model much closer to its larger brothers — 180, 210, 250 class quads. I would go over each element step-by-step:

Packaging:
Just excellent. Everything is neatly packed in a transparent lunch-type box that not only potects the model during shipment but also would serve a role of carry box in future. Really clever.

Frame:
2mm carbon fiber one-piece main base plate and 1mm upper plate with plastic standoffs for PDB and upper plate. Plus aluminum standoffs and soldered pins between PDB and flight controller. Looks and feels pretty sturdy for 90mm FPV quad.



Motors:


- Height: 14mm
- Weight: about 3.9g
- Shaft: φ1.5mm (1mm outside)
- KV (rpm/V): 7800
- Voltage: 3.7-11.1V
- Battery: 1-3S lipo battery
- Prop: 3 inch, 2 inch, 65mm, 45mm
1103 7800kv brushless motors with 1,5mm shafts (inside) and 1mm shaft (outside). M2 thread for 4 bottom screws and same for 4 top prop screws. Interesting fact is that when we use this model without plastic potection — there are 4 screws provided to hold the motors. But in case if we’d install plastic parts — we only have 2 longer screws with washers per motor to tie them to the frame. Of course, you can find another 4 screws of the same length with washers to have the complete set.
Those motors have a plenty of power for 90GT. Although the THr input is a bit less reactive comparing to many 210 class copters, but still it is much more closer to larger rivals in terms of power than any most advanced brushed model.

PDB + ESCs:

4 in 1 ESC + PDB board that is soldered to the flight controller. ESCs are 3A BLHeli_s and capable of OneShot 42/125, MultiShot, DShot 150/300/600 types of communication. This is absolutely great. Using the latest digital technology like DShot on micro quad brings this model even closer to the larger models we are all got used to.
Note: get familiar with DShot in my other review: HERE
Of course, not much reason to use DShot600 because the flight board is only capable of 4/4KHz loop rate and DShot300 is more than needed. But still this little model beats many other products in this aspect. I am using DShot300 currently. Moreover, you can use BLHeli_s standalone or Chrome applet to configure and update the FW in all ESCs. I would explain this a bit later.
PDB and FC boards are not only held together with 2 aluminum standoffs and screws but also soldered with the pins that deliver power from PDB to FC and ESC signals from FC to PDB. Changing PDB or FC could be a little pain consequently. But nothing really bad. The worst scenario is if one or more of the ESCs are damaged. In this case you would have to change the whole power distribution board.
One strange thing here is that PDB battery connector is a 2S balance plug instead of any other more common type power connector. This is not really an issue as this connector seems to handle input current… but I would better change it to some more convenient type like XT30 or JST plug.
Flight controller:
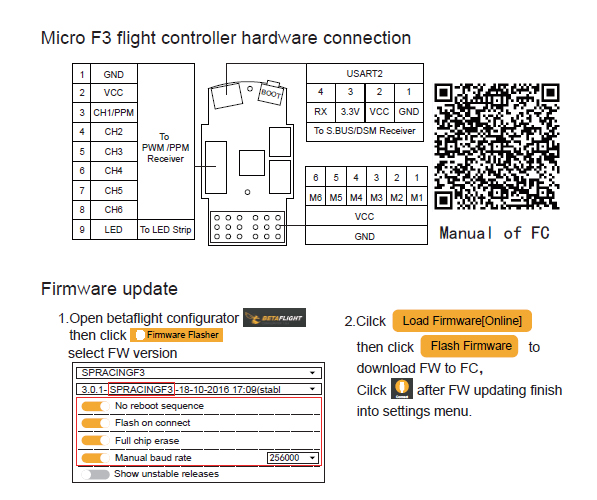
This seems to be micro SpRacing F3. Delievered with 3.0.1 BetaFlight FW from the factory and preconfigured pretty well to start flying out of the box. The HW configuration is using UART2 to connect receivers, motor outputs 1-4 for ESC signals and 2 additional +V and GND pins to deliver voltage to flight controller from PDB. There are also:
- BOOT button that is required to upgrade the FW of the board
- I2C unused port
- UART3 for PPM, PWM receiver port with LED strip control on pin 9 (so, we can have the additional LEDs) and ability to connect OSD or telemetry. Video on how to connect OSD is at the end of the review.
In case of AC800 receiver, BetaFlight confguration is the following:
- UART2 configured to be SerialRX
- Receiver Mode: RX_Serial
- Serial receiver provider: SBUS
Other configuration:
- 4/4kHz loop rates
- MultiShot communication with ESCs (1070 min THr)
- BlackBox logging enabled (there is a flash chip on the FC to carry the logs)
- Accelerometer enabled
- Modes are: ARM on AUX1, Horizon, Angle and Acro on AUX2
- Default PIDs are:

apart that Super Rates for Roll and Pitch should be 70. And D setpoint weight = 1. The complete configuration damp file is stock kingkong90gt
There is no buzzer on the FC. In order to find the lost quad in the field we can set Beacon (signal) in ESCs configuration for 1 or 2 minutes delay. In this case our motors would make a sound instead of a buzzer.
Camera and VTX:
Not bad at all. 800TVL with 150 degrees FOV — this is quite a good piece of FPV technology. You should understand that such small package would suffer a bit more noise because of the smaller physical matrix light sensor in comparison to larger cameras in 180-250 class copters. Lens is removable and can be turned to find the best focus. Camera is fixed in place and cannot change the vetical angle. I wouldn’t tell that this is an issue because we have 150 degrees FOV which is enough to fly FPV without tilting our camera.

VTX is 16CH 5.8GHz 25mW with a button to change frequency. Each press of the button would result in different combination of VTX LED double flash color telling us which CH is currently used.

The VTX range is fine, at least with my KDS Kylin Vision FPV goggles and Aomway cloverleaf antenna. I am able to fly 2 floors of my concrete house without signal blackout and have an acceptable signal strength in the field. It is not comparable with larger 200 or even 600mW VTX with cloverleaf antennas but pretty much enough to have fun indoors or at the field with not so many obstacles around. Let’s say that it is not obvious what would happen first — VTX signal loss or tiny AC800 receiver failsafe…. I would conduct some tests and publish the results here a bit later.
Protection frame:

Definitely a good option for indoor use or for beginners trying to get familiar with flying outdoors. A set comes with 4 separate larger curved parts around porps and 4 parts that join everything together. Total weight with protection is 75g which is 7g more than the weight without the plastic frame. Not much.
Installing this protection means that you would have to remove motors and original screws and use longer screws with washers provided. One other good thing to do is not to use small front plastic joint as it is situated right infront on the camera and disturbs the picture.

Receiver:
I have AC800 receiver for FrSKY. This receiver is kind of actibg strange sometimes. It might show some sudden channel jumps. But usually work quite good. The range is kind of short — something like 100m at open spaces when RX is on top of the frame… If you want something better — you can buy FrSKY Vantac GT90 — same model with FrSKY XM receiver (the link is at the beginning and at the end of this review).
Preflight Mods:
Although this model is almost perfect, I would say that it still needs a couple of mods before the first flight:
- I’ve moved my AC800 receiver to top of the frame (on top of the VTX or move VTX back and mount AC800 infront with some double sided tape. This would ensure the longest range for the RX)

- I’ve added some foam tape under the battery. This ensures that the battery would stay in place.

Flight Setup:
Despite having good PIDs and preconfigured quad out of the box, I’ve done some extra settings:
Updated the board with the latest BetaFlight FW. In order to do that:
- You should have BetaFlight configurator Chrome applet on your PC.
- Press and hold BOOT button on the board and connect the board with the provided microUSB-USB cable to your PC.
- Go to Firmware Flasher, select SpRacing F3 board and latest stable FW underneath

- Select «Load Firmware Online» and than «Flash Firmware»
- When FW flash finishes — you can disconnect the board and connect it again without BOOT button.
After that, I have configured my ESCs to run DShot300, to brake on disarm and to give a searching buzz :
- You should have BLHeli_s Chrome configurator applet on your PC
- Remove your props, power your quad
- Connect to BLHeli configurator
Configurator would discover your ESCs and there would be a button at bottom right to read the configuration from ESCs. Hit that.
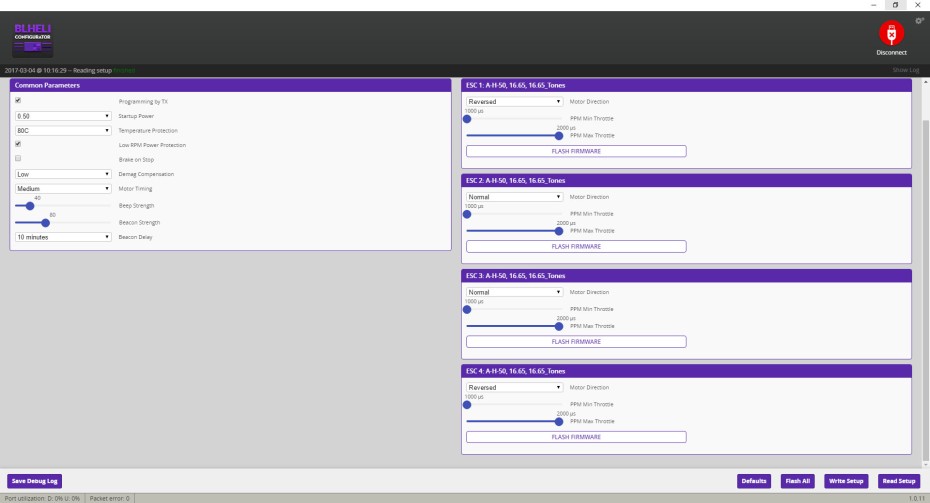
note: this screenshot is taken with other ESCs. Follow the text to find the appropriate settings for KingKong 90GT ESCs.
One the next screen you would see some default parameters along with the option to select and upgrade the FW. Notice that this applet shows some common parameters sections and each separate ESC additional parameters. Moreover, it would also tell you which FW version you currently have on each of your ESCa and let you choose from the drop down menu the appropriate newer|older ones. Decide whether you want to upgrade.
The rest of the parameters are:
Common parameters:
- Programming by TX: common sense — whether you want to use programming mode from TX or not. Leave it default.
- Start up power: the power with which the motor would start to spin. Usually should be left at default 0.50
- Temperature protection: common sense. I set it to 90C.
- Low RPM power protection: protection from overpowering the motors at low RPM — set YES.
- Brake on stop: you can set this to YES which means that motors would stop quickly when DISARMED
- Demag Compensation: protection from motor stalls caused by long winding demagnetization time after commutation. Leave it default.
- Motor Timing: common sense. Most of the motors would run with Medium (default) settings.
- Beep strength: common sense
- Beacon strength: the strength of beeps for motors when Thr is idle too long. Don’t set it high or it can burn your motors. Default value is ok.
- Beacon Delay: time perior of THr inactivity after which beacon beeps would be sounded. Set this to 1 or 2 minutes — this would act as searching buzz instead of buzzer that we do not have on FC.
Individual parameters:
- Motor direction: the direction of motor rotation.
- PPM mix. throttle: for DShot set it to be 1000 (*note)
- PPM max. throttle: for DShot set it to be 2000 (*note)
- Flash FW: look at the top bar of each ESC — it says which version and which FW is currently on your ESCs. Check for the newer FW versions in the drop down menu. Flash if necessary.
Just hit «Write Setup» and you are done.
*note: Since DShot doesn’t require to calibrate Thr signal for ESCs, Min and Max Thr values should be set to the stated limits of 1000 to 2000. The digital signal is passed within those boudaries, therefore, it should be like this for any DShot ESC.
Now, as you are done with ESCs setup, you can connect to BetaFlight configurator, select DShot 150, 300 or even 600 on the Configuration tab. Better to use DShot300.
The last thing to do is to set the idle Thr % for the motors and ESCs (you can see such parameter in the Configuration tab below DShot protocol selected).
This is also easy:
- go to Motors tab
- check «I uderstand the risk……..» warning at the bottom right
- connect your flight battery if it is not yet connected (better to use some current limiter, but I don’t use it)
- click on Master slider and with your keyboard UP button (one press at a time) start to increase Thr%.
- when the motors would start to spin normally (no stall noise, no clicks, just a smooth run) — write down the resulting value. Let’s assume that you’ve got 1070.
- Subtract 1000 and divide by 10. 1070 — 1000 = 70/10 = 7
- You can now enter this number as the idle Thr% in the Configuration tab.
That is it. Your motors and ESCs are now ready to go.
Original DShot document on Github: HERE
Important: one of the main question about DShot and reason to have those on your quad is the loop time: what loop time DShot can handle and how it correlates with the gyro and PID loop times on your FC board. As you probably know, the rule to set max Gyro loop and PID loop frequency in Configuration tab is CPU load of the FC (shown at the very bottom of the applet). CPU load should not exceed 30% after making the change. F3 board on KingKong 90GT would allow up to 4 / 4kHz to run but it depends of the features enabled on the board (acceleromter, barometer, etc). Since one of my flight modes (Horizon) requires accelerometer to run, I can go as high as 4 (gyro) / 4 (PID loop — that is what ESCs would use) kHz loop time and get 27% CPU load. Now, let’s see what DShot is capable of:
- DSHOT150: 4kHz max
- DSHOT300: 10,6kHz max (10,6khz is only available on 32khz gyro boards)
- DSHOT600: 16kHz max
- DSHOT1200: >32khz max
So, in my case DShot300 is the right choice. Why? Because DShot150 would reach the limit (it is always bad not to leave some room) and DShot600 would be a huge excess that would drive DShot600 ESCs to the max amount of signals despite the FC board is incompatibe of running such speeds (FC PID loop is 4kHz, DSho600 loop is 16kHz ). Therefore, DShot300 is a good choice.
Than, I’ve configured my radio and calibrated channels on the Receiver tab of BetaFlight FW. This is common.
- You should have your channels configured so that min CH of the radio would result in 1000 in Betaflight, mid channel = 1500 and max CH = 2000. You should use subtrims and endpoints setup in your radio to do that.
note: there is a small problem with AC800 receiver and FrSKY Taranis radios. No matter how I’ve tried to set endpoints in the radio — it would result in something like 1079 min and 1965 max values in BetaFlight. In order to overcome this, we have to scale the channels in BetaFlight configurator using the following CLI commands:
Suppose you have -100 min and +100 max CH range for all channels in SERVO tab of your model in Taranis radio and you are resulting with the same figures in Betaflight Receiver tab (1079 min and 1965 max value for corresponding channel). You can execute the following commands in CLI:
rxrange 0 1079 1965 rxrange 1 1079 1965 rxrange 2 1079 1965 rxrange 3 1079 1965 save
This would scale down BetaFlight channels input so that they would correspond to incoming AC800 signals. (Thank you Reavski from RCG for a hint)
Finally, I have reconfigured my PIDs slightly.
Only made RC rate and Super Rate a bit more to have 1000 degrees speed of manuevers upon full ROLL and PITCH inputs.
Overall feel:

Flies great. It is really very close to the experience of flying on 180-210 quads with a good HW setup. Power is enough to jump over obstacles very quickly and make quick rolls and flips. Moment of inertia is easily controlled when having such powerful motors and this what really differs 90GT from brushed copters. Motors run smoothly and quietly. VTX power is enough to fly 2 concrete floors indoors and pretty large range with no obstacles outdoors. 25C rating battery is also enough to deliver some good pitch pump power. This model really feels and behaves as if it is a larger quad. And it does not force you to change the style of flying compared to 180-250 quads. This is the most important for me. Moreover, the durability of the motors is much higher than brushed motors have and the frame seems to be capable of standing many collisions.
First flight indoors video (camera picture is better, this is my bad recorder):
First flight outdoors video (camera picture is better, this is my bad recorder):
Conclusion:
I love KingKong 90GT. It really does its job almost perfectly. It is capable of indoor use during some bad weather as well as outdoor flights almost on par with larger brothers. I would say that this model is ideal for any beginner — very durable, has the removable protection, gives the experience of larger models. Excellent hobby entry and a must have for everyine who wants to fly indoors or keep hands warm during long winters. But keep in mind that you’ll need some spare batteries. Stock one is good only for 3 mins of flight time. I would suggest 450-500mAh 25C 2S instead.
New version of this product: FrSKY Vantac GT90 — similar product but with much better FrSKY receiver XM in the bundle.
You can buy KingKong 90GT: HERE Don’t worry, this shop is from good person in China. It might look unfinished yet but your orders would be pocessed in the best way. Support this shop on its early stage and we would eventually have one more good place to order from. If you would have any questions about your order — leave a comment and I’d help you out.







Video how to connect OSD:
courtesy of ssevet channel on YouTube
Setting up OSD: serial passthrough
Stay tuned, more reviews to come!!!


Thanks for this amazing in depth review of the GT90. I can’t believe how much detail you have gone into. I totally agree that this is an amazing quadcopter. I absolutely love it.
НравитсяНравится 1 человек
Thank you for your comment. We are trying to make our reviews cover all the necessary things. You can read our other English reviews on this page https://marketchangers.wordpress.com/%d0%be%d0%b1%d0%b7%d0%be%d1%80%d1%8b/
НравитсяНравится
Do you recommend the Vantac 90gt over the KingKong 90GT? Are they the same except for the receiver?
НравитсяНравится
yes, they are the same. But the XM receiver is better than AC800 if you have FrSKY radio
НравитсяНравится
Thank you for this very thorough review and guide, it was very helpful!
НравитсяНравится 1 человек
you welcome
НравитсяНравится
does the taranis qx7 d8 mode work with the ac800 receiver…if so does anything special need to be done to get it to bind correctly? through d8mode i get it to bind but not correctly
НравитсяНравится
What do you mean by «not correctly»? What happens and why di you think it is incorrect?
НравитсяНравится
well when i arm the motors the min throttle value reads correctly at 1070 for motor 1 but not the other motors, then i un connect the battery re-bind, and same problem only on motor 4 min value reads at 1070 when i arm and the rest of the motor speeds are up and down not a stable speed.. tells me in betaflight… when i give it a little throttle they all shoot speeds all over the place like its jumping… i did calibrate the esc’s music chimes… the motors react smooth one at a time manually through the tabs on the computer but when the taranis qx7 is bound the motors react like this…does this mean i need a different controller for the receiver?
НравитсяНравится
It means that you have done something wrong or that you don’t understand something. Make a video of your problem. Where do you see that min THR value reads correctly 1070 when armed?
НравитсяНравится
well i figure some progress is good…i got all motors to arm correctly on motors tab in betaflight and my dummy self had to put the props on… chasing a ghost problem, the accelerometer was adjusting to auto level making the motors twitch…fixed,
but now after putting on bumper guards and it tries to bind, the taranis vibrates to say i am bound, reads 92 on the rssi, but will not receive any inputs from the controller again, i go to the receiver page where it shows all the inputs and levels, but none are moving with the controller… am i binding in the wrong order?
НравитсяНравится
Taranis necer says that it is bound. You have to switch radio first and than swtich on the model.
НравитсяНравится
did i do something irreversible?
2017-05-06 @ 12:25:48 — Running — OS: Windows, Chrome: 58.0.3029.96, Configurator: 3.1.1
2017-05-06 @ 12:26:49 — Serial port successfully opened with ID: 1
2017-05-06 @ 12:26:49 — MultiWii API version received — 1.21.0
2017-05-06 @ 12:26:49 — Flight controller info, identifier: BTFL, version: 3.0.1
2017-05-06 @ 12:26:49 — Running firmware released on: Oct 18 2016 10:35:52
2017-05-06 @ 12:26:49 — Board: SRF3, version: 0
2017-05-06 @ 12:26:49 — Unique device ID received — 0x2100214234570820383738
2017-05-06 @ 12:27:29 — Accelerometer calibration started
2017-05-06 @ 12:27:31 — Accelerometer calibration finished
2017-05-06 @ 12:38:12 — EEPROM saved
2017-05-06 @ 12:40:35 — Unrecoverable failure of serial connection, disconnecting…
2017-05-06 @ 12:40:35 — Serial port successfully closed
2017-05-06 @ 12:40:50 — Serial port successfully opened with ID: 2
2017-05-06 @ 12:40:50 — MultiWii API version received — 1.21.0
2017-05-06 @ 12:40:50 — Flight controller info, identifier: BTFL, version: 3.0.1
2017-05-06 @ 12:40:50 — Running firmware released on: Oct 18 2016 10:35:52
2017-05-06 @ 12:40:50 — Board: SRF3, version: 0
2017-05-06 @ 12:40:50 — Unique device ID received — 0x2100214234570820383738
2017-05-06 @ 12:41:51 — EEPROM saved
2017-05-06 @ 12:41:52 — Device — Rebooting
2017-05-06 @ 12:41:54 — Device — Ready
2017-05-06 @ 12:42:10 — Unrecoverable failure of serial connection, disconnecting…
2017-05-06 @ 12:42:10 — Serial port successfully closed
2017-05-06 @ 12:42:20 — Serial port successfully opened with ID: 3
2017-05-06 @ 12:42:20 — MultiWii API version received — 1.21.0
2017-05-06 @ 12:42:20 — Flight controller info, identifier: BTFL, version: 3.0.1
2017-05-06 @ 12:42:20 — Running firmware released on: Oct 18 2016 10:35:52
2017-05-06 @ 12:42:20 — Board: SRF3, version: 0
2017-05-06 @ 12:42:20 — Unique device ID received — 0x2100214234570820383738
2017-05-06 @ 12:42:49 — Unrecoverable failure of serial connection, disconnecting…
2017-05-06 @ 12:42:49 — Serial port successfully closed
2017-05-06 @ 12:43:05 — Loaded release information from GitHub.
2017-05-06 @ 12:49:46 — Using cached release information.
НравитсяНравится
Seems that there is something wrong with your USB port or drivers. Try other USB, if it won’t help — try other PC.
НравитсяНравится
got it working great, what is the best battery for the longest flight time, and would a 850mah 25-40c 2s work?
НравитсяНравится
I think that 850 would be too heavy. Use 450 or 500 at most
НравитсяНравится
Hello Seth.
I have same problem. How did you fix the problem of ‘i go to the receiver page where it shows all the inputs and levels, but none are moving with the controller… am i binding in the wrong order?,
НравитсяНравится
Hello everyone! For some reason my FC stopped to see the radio. I have an XM+.
The port are set normally. Uart 1 on and Serial ON on UART 2.
SBUS in Configuration, but the receiver doesn’t show any activities.
НравитсяНравится
Thank you for the great read. I’ve learned so much by this one post. I’m having backward drifting on my kingkong 90gt in angle and horizon mode. Would you know how to fix that issue?
НравитсяНравится